工业机器人在什么情况下遇到奇异点
发布日期:2023年04月18日

合肥蓝柏匠才职业培训学校技术赋能企业发展实现蓝领社会价值
机器人奇异点概念:机器人自由度退化,逆运动学无解的空间位置。
工业机器人之所以会有奇异点,是因为机器人是由数学控制(公式可以达到无限大),但移动的是真实物理部件,它无法实现无限大。如果控制器命令机器人某个关节以无限大的角速度旋转180度时,机器人关节就会出现奇异点。
奇异点的类型有:腕关节奇异点,肩关节奇异点,肘关节奇异点。
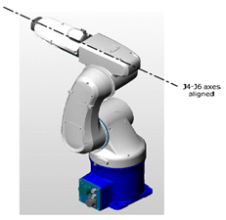
1)腕关节奇异点,当5轴为0°时,4轴和6轴在同一角度时。腕关节异点是关节机器人最 容易遇到到奇异点。
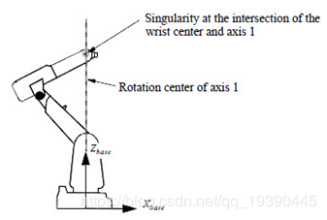
2)肩关节奇异点,5轴中心点处于通过1轴、平行2轴的平面上。肩部奇异点非常复杂,机器人逆运算时存在无数解。
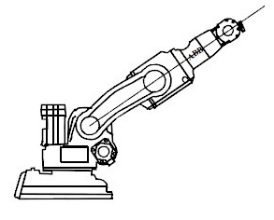
3)肘关节奇异点,在5轴中心点处于1轴、2轴组成的平面上。肘关节奇点看起来就像机器人“伸得太远”,导致肘关节被锁定在某个位置。
机器人直线行走时,经常会报错,就是因为有些点位靠近奇异点,导致机器人无法行走,由于奇异点是天生的,无法避免,因此在机器人布局时,需要格外注意取放点位和行走轨迹是否靠近机器人奇异点
奇异点的解决办法:
1.在规划路径中尽可能的避免机器人经过奇异点。
2.结合机器人运动学,优化机器人反解算法,确保在奇异点附近伪逆解的稳定性。
