



ABB 机器人课程

 请询价
请询价
昆山众兴PLC培训 官方咨询微信
第1部分. ABB 机器人整体介绍
1.1. IRB120 介绍(应用、组成、主要技术参数)
1.2. 机器人安全注意事项
1.3. IRB120安装
1.4. 示教器概述
第2部分. ABB 机器人手动操作
2.1. 运动模式—单轴运动
2.2. ABB 机器人零点校正
2.3. 运动模式—线性运动
2.4. 运动模式—重定位运动
2.5. 工具坐标系定义
2.6. 工件坐标系定义
第3部分. ABB 机器人的 IO 通讯
3.1. IO硬件介绍
3.2. IO信号配置
3.3. 系统IO配置
3.4. 安全信号
第4部分. ABB 机器人的程序数据
4.1. 数据存储类型
4.2. 常用数据类型
4.3. 新建程序数据
第5部分. ABB 机器人的编程应用
5.1. 程序结构介绍
5.2. 四种运动指令
5.3. 逻辑指令与控制指令
5.4. 工具负载测定
5.3. 工件坐标系校正
第6部分. 高级 Rapid 指令学习
6.1. 功能函数
6.2. 中断程序
6.3. 事件例行程序
6.4. 多任务
6.5. 安全区
第7部分. RobotStudio 软件的应用
7.1. RobotStudio安装与破解
7.2. RobotStudio 工作站创建与使用
7.3. RobotStudio 三种离线轨迹生成
第8部分. 机器人和西门子 PLC 之间的控制
8.1. ABB机器人Profinet通讯设置
8.2. PLC 组态profinet通讯
8.3. PLC 与机器人的信息交互(总线:profinet)
8.4. ABB与PLC进行socket通讯
第9部分. ABB 机器人系统项目实战
9.1. 学会设计调试一个单工位抓取项目
9.2. 学会设计调试一个机床上下料程序
9.3. 学会设计调试一个打磨项目
9.4. 学会设计调试一个码垛项目
第10部分.实战训练说明
实训工作站 1,包含主要的实训项目有:打磨、搬运、码垛、装配
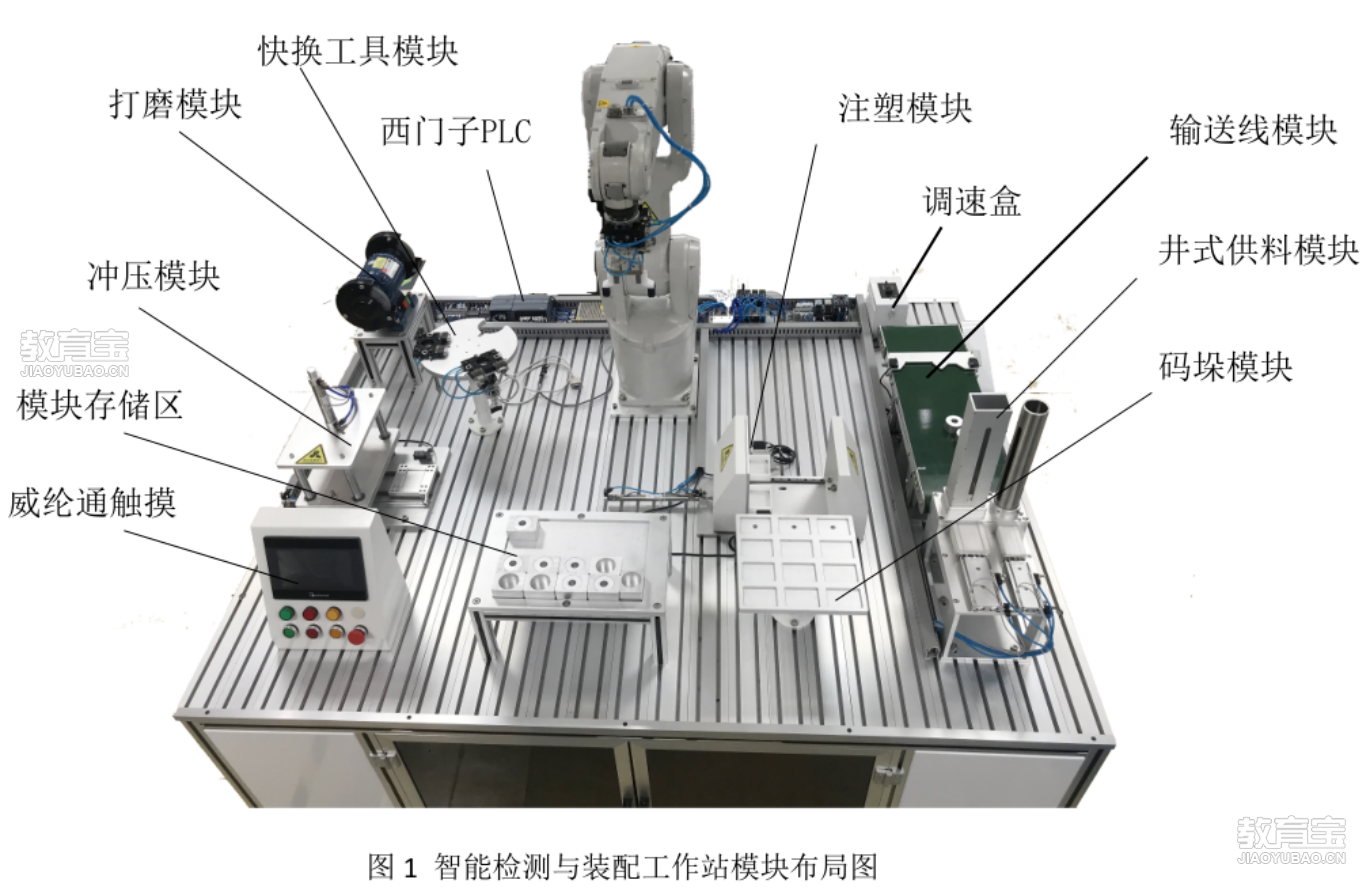
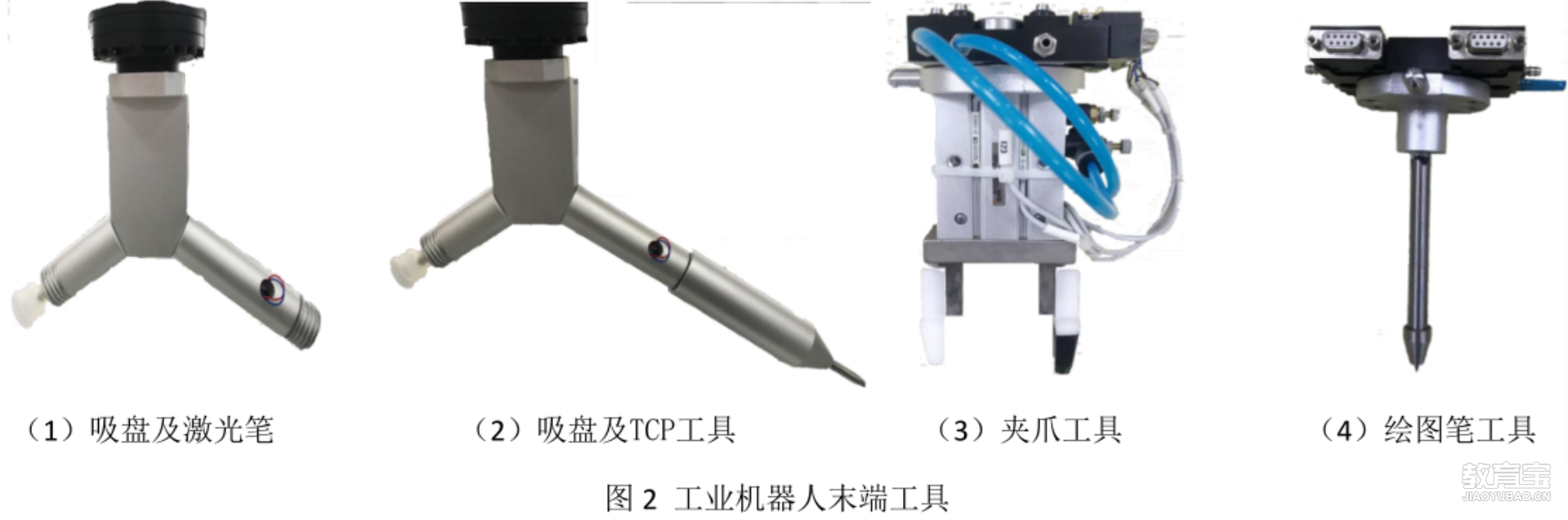
机器人末端夹治具
实训台

实训项目 1:料仓→传送带→码垛
本项目主要针对生产线搬运、分拣、码垛项目。如今工业对生产效率要求越来越高,搬运、分拣、码垛工作既枯燥又劳累,而且工作时间长,因此机器人在产品搬运、分拣、码垛领域得到大规模地应用,有效地解决招工难、效率低的问题。

实训项目 2:料仓→传送带→注塑/冲压→码垛
本项目主要针对注塑机、冲压机等生产类设备的自 动上下料项目。
在少品种大批量生产的加工的生产场景中,做生产设备上下料是频繁也没有价值的工作之一,这种重复单调的工作特别适合机器人来做,因此机床等自动
上下料也是机器人大规模应用的领域。

实训项目 3:料仓→传送带→打磨→码垛
本项目主要针对加工打磨一体化的工作站。机床等设备在加工完零件之后经常需要做去毛刺处理,为了提升效率和节约时间,我们可以在机床下料后紧跟着做打磨处理,这样机器人能够利用利用机床加工时间,完成零件去毛刺的工作,极大地节约时间成本。





