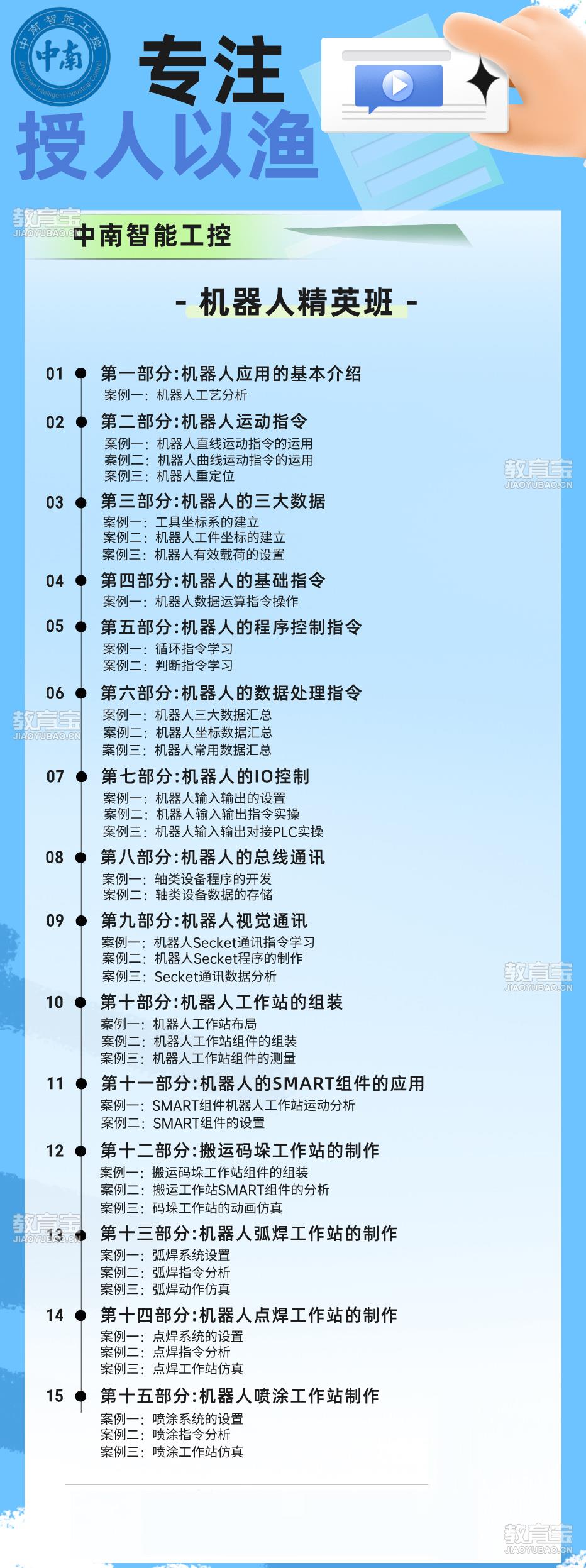
机器人精英班

 请询价
请询价
专业解答各类课程问题、介绍师资和学校情况
培养目标:
PLC工业机器人的培养目标主要是培养具备工业机器人编程、应用及维护保养等必备的专业理论知识,同时掌握工业机器人操作与运维、工业机器人系统集成应用以及工业机器人系统运行维护等专业技能。学成能面向工业机器人本体制造、生产应用、技术服务等各类企业和机构从事相关工作。
课程内容:
一、机器人学习课程框架--硬件基础
1.*BB机器人出厂硬件组成介绍(示教器介绍,控制柜介绍,本体介绍)
2.法那科机器人硬件简介及面板操作介绍
3.*BB机器人及法那科机器人安全信号介绍(解决项目实践安全门的制作)
案例一:实操制作机器人各组件的连接
案例二:实操机器人安全IO接线(防护门急停制作)
二、机器人选型篇
1.了解机器人工艺(搬运,码垛,弧焊,点焊,喷涂)
2.介绍工业机器人选型关键参数数(机器人负重介绍,机器人半径介绍)
案例一:实操机器人选型
三、机器人基本操作
1.*BB机器人和法那科机器人面板操作认识(法那科机器人动作示教,ABB机器人示教)
2.法那科及ABB机器人运动指令分析(点对点运动,直线运动,弧形运动)
案例一:实操机器人方型轨迹绘制
案例二:实操弧形轨迹绘制
案例三:实操混合型轨迹
案例四:实操机器人避障轨迹
3.机器人数据类型介绍(点位数据,整数据,字符串数据)
4.工具坐标和工件坐标的比对(工具,工件坐标的建立,三点,四点法坐标系建立)
案例一:设置点位数据让机器人走指定的点
案例二:工件工具坐标比对实操
案例三:不平整斜面轨迹实操
案例四:重定位及立体轨迹的制作
5.法那科机器人及ABB机器人IO通讯卡介绍
6.IO指令的介绍
7.IO信号的配置和卡的添加及法那科机器人IO的分类
案例一:实操ABB机器人信号的添加和板卡的添加
案例二:实操法那科和ABB机器人IO信号接线
案例三:实操法那科和ABB机器人信号的仿真
8.机器人IO指令的应用(信号置位和信号复位,信号等待指令)
案例一:实操机器人气缸夹取程序及简单的搬运
9.*BB机器人系统IO,通用IO,机器人IO介绍
案例一:ABB机器人利用系统IO启动主程序
案例二:法那科机器人利用机器人IO置位气缸及外围信号
案例三:利用PLC启动机器人进行简单的搬运
10.机器人运动速度设置指令(运动速度和加速度设置)
11.机器人时钟读取(机器人时钟数据及指令介绍)
案例一:实操读取机器人的运动时间
四、机器人逻辑操作篇
1.法那科和ABB机器人循环指令介绍(FOR语句,WHILE介绍)
案例一:设置机器人运动次数
案例二:判断信号机器人运动
2.机器人判断语句(IF语句,SWICH语句,TEST,CASE语句)
案例一:六方格搬运实操
案例二:数据判断执行案例
3.*BB法那科.机器人偏移函数(工具偏移和工件偏移,工具重量写入指令)
案例一:九方格搬运项目实操
案例二:栈板搬运项目
4.控制程序指令介绍(jump跳转指令)
案例一:循环计算程序分析
案例二:条件跳转程序分析
五、字符串函数介绍通讯准备篇
1.字符串函数的介绍
2.字符串函数的介绍(字符串的读取,字符串的截取,字符串的拼接)
案例一:字符串传输及截取案例
案例二:通讯ASIII码的读取
六、ERORR程序介绍及视觉通讯准备篇
1.机器人程序分析(法那科机器人TEST程序的调用,ABB的子程序及模块定义)
2.子程序的调用指令
3.*****te指令只介绍
4.***RR程序学习
案例一:ERORR程序案例分析
案例二:有初始化子模块程序制作
六、中断
1.中断程序介绍
2.中断指令分析(启用中断指令,中断连接,中断触发,中断清除)
案例一:机器人复位中断实操
案例二:机器人中断案例实操
七、机器人通讯
1.*BB和法那科机器人PROFNCE总线配置分析(通讯配置,IP设置,字节发送配置)
2.法那科机器人CCLINK通讯分析
3.机器人视觉SECKET通讯(连接指令,创建指令,发送指令,接收指令)
案例一:ABB机器人和西门PLC走PROFINCE通讯实操
案例二:法那科机器人和三菱FX-3UPLC走CCLINK通讯
案例三:法那科机器人和视觉相机通讯案例
案例四:ABB机器人和视觉相机通讯案例
八、机器人工艺配置学习
(一)机器人弧焊工艺配置
1.弧焊系统硬件介绍(焊机,送丝,焊枪,气体)
2.弧焊参数介绍(焊接电流,焊接电压,摆弧,起弧收弧)
3.焊接IO的配置
4.焊接指令的介绍
案例一:机器人弧焊程序编写实操
(二)机器人点焊篇
1.机器人点焊系统介绍(修模,冷却)
2.点焊焊枪介绍(伺服焊枪,气缸焊枪)
3.其气人第七轴的设置
4.点焊焊机的设置(电流,电压)
5.修模指令和点焊指令分析
6.机器人点焊程序飙血
案例一:机器人点焊焊枪调试实操
案例二:机器人点焊程序编写实操
(三)法那科(robtguied软件离线部分)
1.仿真软件机器人系统配置
2.工具坐标工件坐标选择及设置
3.工作站的建立
4.路径的建立
5.仿真路径
(四)robtguied仿真单一工作站搬运
1.工作站系统的设置
2.工作站组件的导入
3.夹具的设置(夹具动作的设置,夹具仿真的动画)
4.工件的配置及设置(组件设置,动画设置)
5.仿真动画的制作
6.机器人程序制作
(五)机器人机床上下料仿真工作站
1.工作站系统的设置
2.机械装置的建立
3.IO板的建立和分析
4.仿真机床的导入
5.第七轴的创建和分析
6.工件动画的制作
7.工具动画的制作
8.仿真程序的制作
9.动画仿真
(六)两台以上机器人多系统设置
1.双机器人系统的创建
2.双机器人导入
3.双系统IO板的建立分析
4.机械装置的系统分析
5.工具动画制作
6.双系统工件动画的制作
7.系统点位示教
8.仿真动画制作
9.仿真程序的制作
10.汽车厂双机器人系统分析
11.电子厂多系统分子
12.对比不同
说明:学校根据实际需要可以更新课程内容,如有更新以新的教学内容为准。
就业方向:
工业控制PLC的应用十分广泛,包括电子集成电路、半导体、仪器仪表制造、工业自动化、汽车装配制造、通信网络设备、原材料及模具加工、互联网计算机。环保新能源等各种行业,可以说涵盖工程、制造业的各个方面。
岗位包括:
PLC编程调试工程师、自动化设备设计师、工业自动化工程师、电气自动化工程师、自动化设备维护保养工程师等等。
学习培训对象:
★ 广大从事电工行业想提升自己技能的电工朋友
★工厂普通职位员工,技术员,设备维护员,管理层,想改变目前生活状态的朋友
★ 各初中、高中毕业生、大中院校应届毕业生,想提升技能,加强动手能力的学生朋友。
★ 社会各界有志之仕,想通过努力改善生活现状的朋友。
★以上人员如没有电工经验,可以先学习电工课程。学完后可以达到自己独立完成布线,选型,控制柜,开关柜设计制作水平。